
 (C:)
(C:) AliCloud
AliCloud 【搞机小子】Airpi AP3000M 5G CPE 使用体验
【搞机小子】Airpi AP3000M 5G CPE 使用体验 

书接上回【阅板无数】(Intel x86 IoT系列)Intel Arduino/Genuino 101 简单测评,我们讲到在2015年1月的时候,Intel “积极”拥抱开源硬件,推出了基于 Quark SoC 的 Arduino/Genuino 101 开发板。(其实英特尔在2013年就在英特尔论坛上推出了 Quark 系列的 32 位 x86 架构微控制器,很可惜在2019年1月英特尔宣布停止Quark系列产品的生产。)
前言
站在后人的角度看待英特尔在 IoT 领域的尝试,英特尔的确是有点“心有余而力不足”,倒也不至于全产品线沦落到“出师未捷身先死”的地步。其第一款产品是单核心 32 纳米 X1000 SoC,应用在 Intel Galileo 开发板上。Intel Galileo 是基于 Intel x86 架构的 Arduino 认证开发板系列中的第一款,专为创客和教育社区而设计。
单凭这第一款产品可以看出来英特尔是想要积极拥抱开源硬件吗?如拥,用过这玩意儿的都知道,这个还要单独供电,核心非常烫手。(关于这款板子后续会有文章介绍,今天我们着重介绍 Quark D2000。)
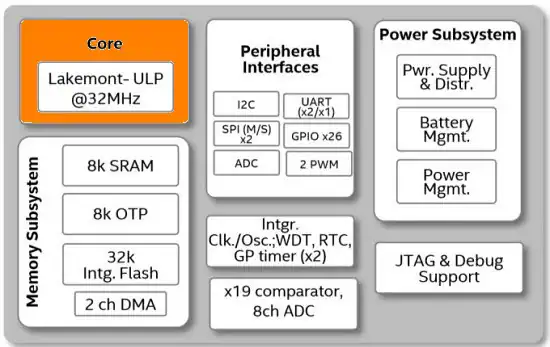
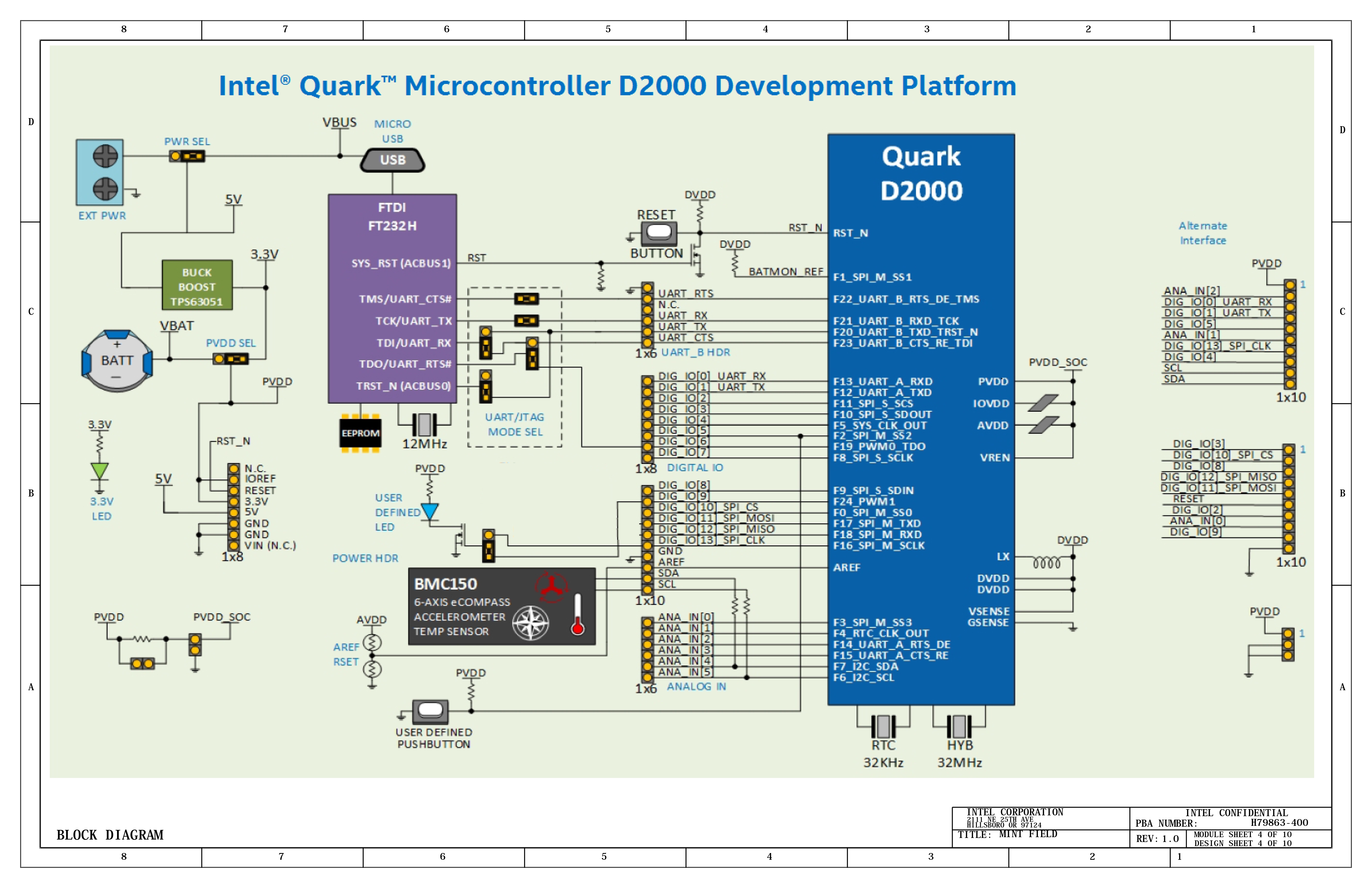
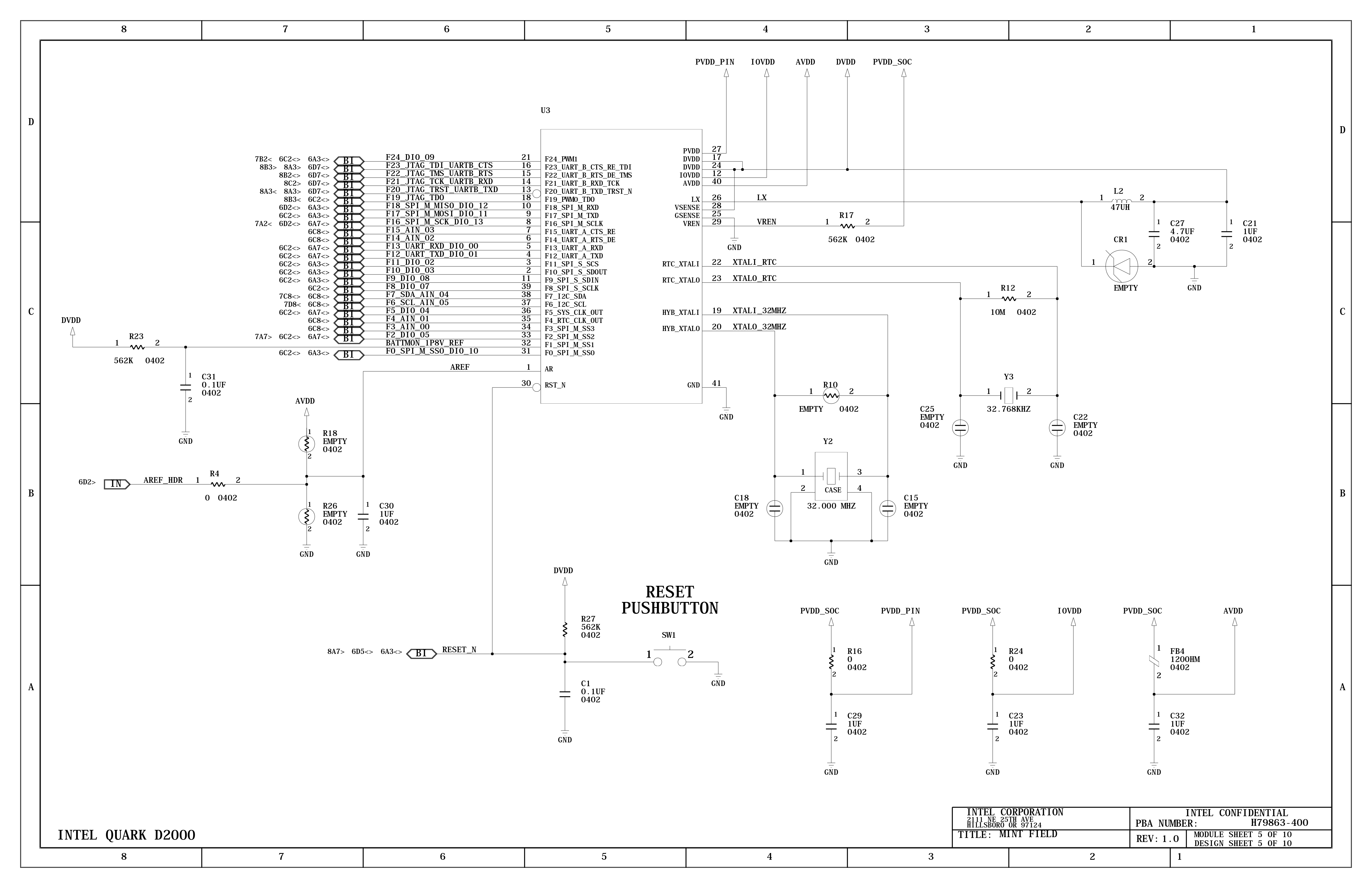
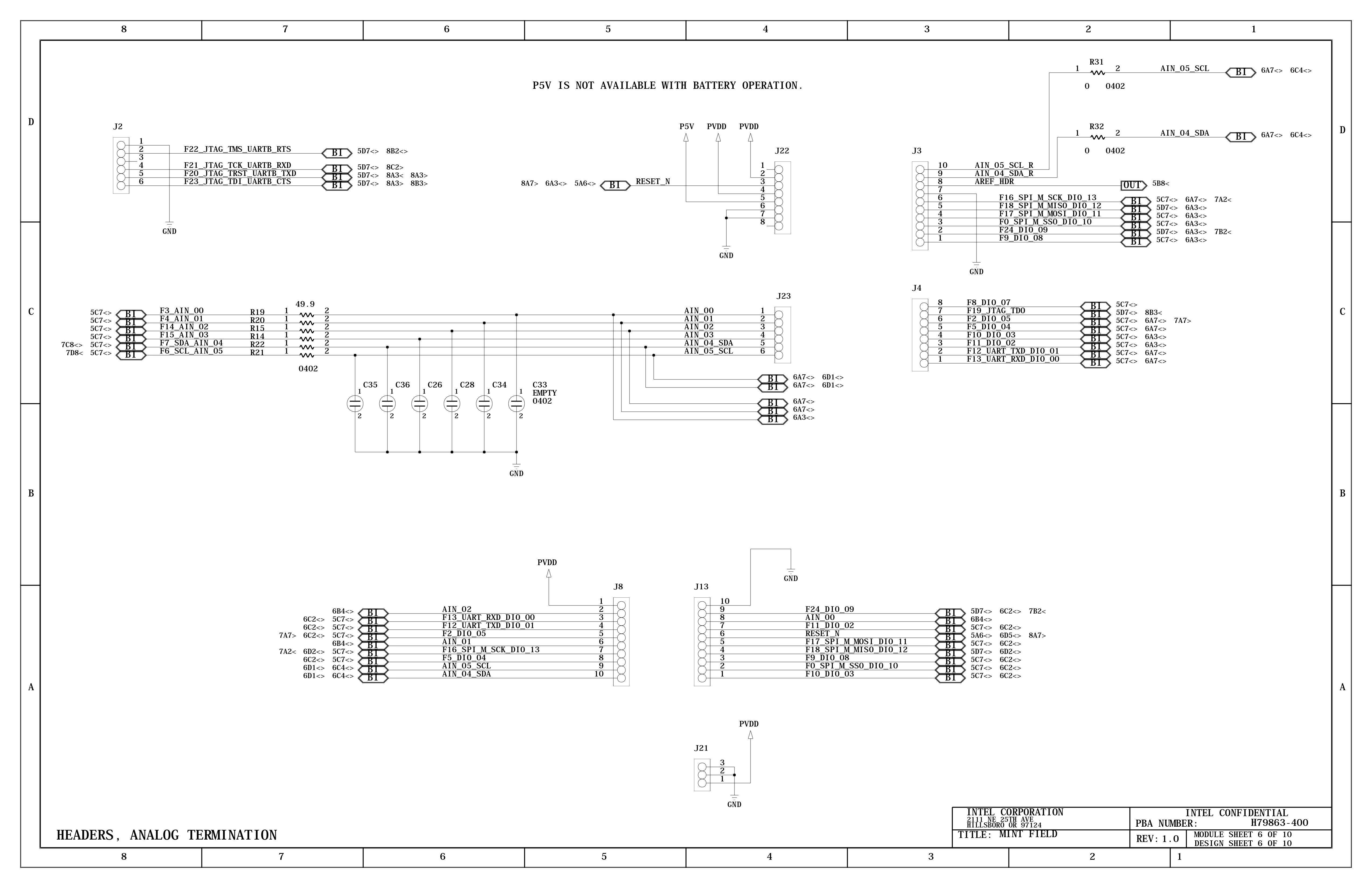
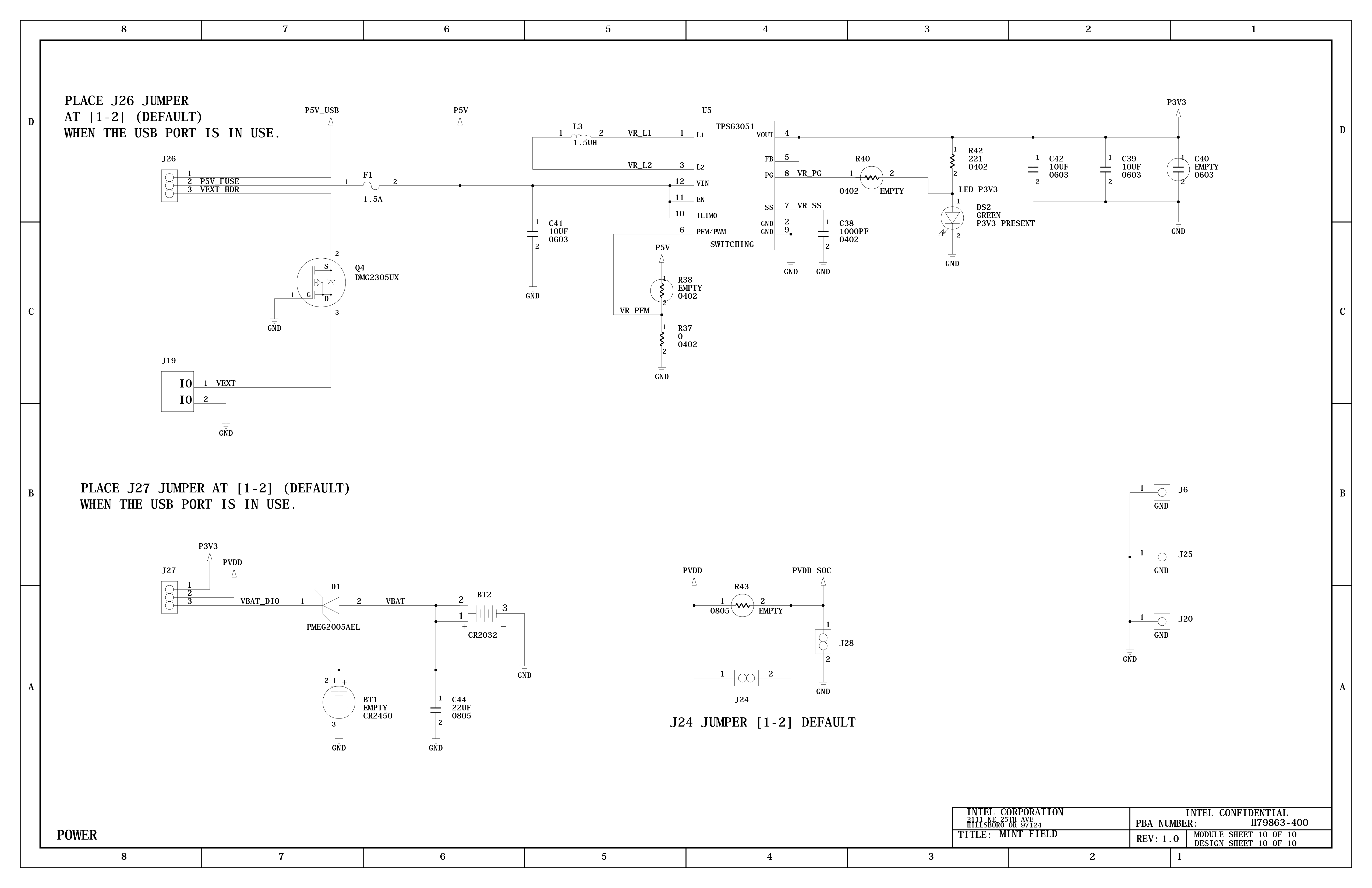
这款代号为“薄荷峡谷(Mint Valley)”的 Intel Quark D2000 SoC 是英特尔在2015年Q3季度推出的产品,应用在 Intel Quark Microcontroller D2000 开发板上。它是英特尔在 IoT 领域的又一次尝试,旨在提供一个低功耗、低成本的解决方案,适用于物联网设备和嵌入式应用。
同时,Quark 系列也补全了英特尔在嵌入式微控制器领域的产品线。商用的 Xeon,消费级的 Core/Pentium/Celeron 系列,移动端的 Atom 系列,嵌入式的 Quark 系列。自此,英特尔补完了在微电子领域的产品线。EE补完计划
规格
| 产品名称 | Intel Quark D2000 Series |
|---|---|
| 代号 | Mint Valley |
| 垂直细分产线 | 嵌入式微控制器 |
| 核心架构 | 32 位 i586 |
| 核心数量 | 单核心 |
| 主频 | 32 MHz |
| L1 Cache | 0 KB |
| GPIO | SPI, I2C, GPIO, SPI, Comparators, ADC, PWM, DMA |
| UART | 2 个 UART |
| 封装 | LQFN40 |
| 描述 | 32位,单核单线程,Pentium ISA 兼容微控制器 |
有意思的是,虽然写的是 Pentium ISA 兼容微控制器,但是它不支持 SIMD 或 x87 浮点。(玩过 8087 的都知道,8087 是 Intel 的第一个浮点协处理器。这玩意儿运行起来十分烫手,估计是因为功耗原因没加入 x87 浮点指令集。)
结语
不过这款产品还是非常能打的,站在软件开发的角度来看,英特尔其实是想把在 CPU 端的开发经验带到嵌入式领域。毕竟到了2015年,英特尔在 CPU 领域已经有了几十年的积累,x86 架构的微控制器可以让开发者更容易地使用现有的 x86 工具链和软件库,从而降低了开发门槛。
但是这样也有缺点,英特尔历史包袱太重,放不下庞大的PC/商用市场,或者说英特尔只是想在 Maker 社区和开源硬件社区赚一波快钱。这款产品从发布到生命周期结束,英特尔都没有好好对待。首先就是开发平台就只能使用 Intel System Studio for Microcontrollers,完全看不出英特尔拥抱开源硬件的诚意(特别是 Arduino 授权,用 Arduino Uno 的 Pinout 但是不支持 Arduino IDE)。
反观 Nordic 和 Espressif 的产品,Nordic 的 nRF 系列和 Espressif 的 ESP 系列都提供了丰富的开源支持和社区资源,尤其是 Arduino,开发者可以轻松上手(Arduino 确实是为打破壁垒做出巨大贡献,让很多非电子专业的人们可以快速开发自己想要的东西)。而英特尔的 Quark D2000 开发板在这方面就显得将这些需求置若罔闻。
很重要的一点就是拥抱开源社区其实是在培养用户粘性,就好比 Espressif 的 ESP 系列产品,提供了丰富的开源支持和社区资源,尤其是 Arduino 生态系统。开发者可以轻松上手,快速开发出各种物联网应用。如果需要开发更复杂的应用,还可以使用 ESP-IDF(Espressif IoT Development Framework)进行更底层的开发。
也可能是因为时任英特尔 CEO 的布莱恩·科再奇(Brian Krzanich) 对下属十分热情 对开源硬件的热情不够,导致英特尔在这方面的投入和支持力度不足。也可能是他在任期间,因为其战略决定,导致英特尔在研发10纳米制程芯片的进度上相比台积电及三星都要缓慢,导致市场占有率被竞争对手超微所蚕食。2
The Verge 还提到,英特尔虽然以 PC 和服务器而闻名,但其业务已被智能手机和云颠覆,而该公司似乎对人工智能和自动驾驶汽车的兴起毫无察觉。英特尔承诺推出智能耳机、英特尔驱动的智能手表、智能眼镜、英特尔电视服务、搭载英特尔芯片的无人机和自动驾驶汽车,但英特尔大约 85% 的收入仍然来自其服务器和 PC 工作。近年来,英特尔曾多次试图在 CES 上通过华丽的主题演讲重新定位自己,但这些努力没有说服力,也缺乏重点。
站在开源硬件的角度,英特尔同样不受待见。Arduino 社区从未接受 Curie,随着 Linux 驱动的 Raspberry Pi 越来越主导低端黑客板卡领域,Arduino 兼容性变得不再是必备功能。对于英特尔试图通过其 Curie 吸引的豪华智能手表供应商来说,这当然没有多大意义。
x86 社区也没有太多考虑 Quark。由于 Quark 最初仅宣布与 Pentium ISA 兼容,因此它的进展最初放缓了。当 Intel 添加 x86 兼容性时,为时已晚3。
时任 LinkedIn 半导体销售和营销小组的主持人 Bill Giovino4 评价 Intel Quark D2000 的文章中提到:如今,似乎每家半导体公司都有用于物联网 (IoT) 的微控制器解决方案。我们看到了来自通常内核供应商的低功耗、高性能和高集成度微控制器的规格。但是,当英特尔宣布将重新进入微控制器业务,推出用于物联网的 32 位 x86 MCU 时,就像雷神拿起锤子再次参加比赛一样。
注:英特尔最早的产品是3101 SRAM,英特尔第一款微控制器是基于哈佛架构的 Intel 8048/MCS-48(1976年),其衍生版本就有著名的 8051,也就是51单片机。
只可惜,在死神面前,雷神的锤子不堪一击,甚至连锤子都被捏的粉碎。
复活雷神的锤子
上面提到了,这款产品没有适配 Arduino IDE,所以我们需要使用 Intel System Studio for Microcontrollers 来编译和烧录程序。
可笑的是,英特尔在2019年1月宣布停止Quark系列产品的生产和支持,这意味着 Intel System Studio for Microcontrollers 也不再更新了。甚至 Intel System Studio for Microcontrollers 的下载链接都失效了。英特尔只保留了 Quark D2000 的数据手册、规格说明书和一些指南。
Quark D2000 Dev Platform的一些官方和三方链接我贴在此处:
- Intel® Quark™ Microcontroller Developer Kit D2000 – Getting Started for Windows* - Intel
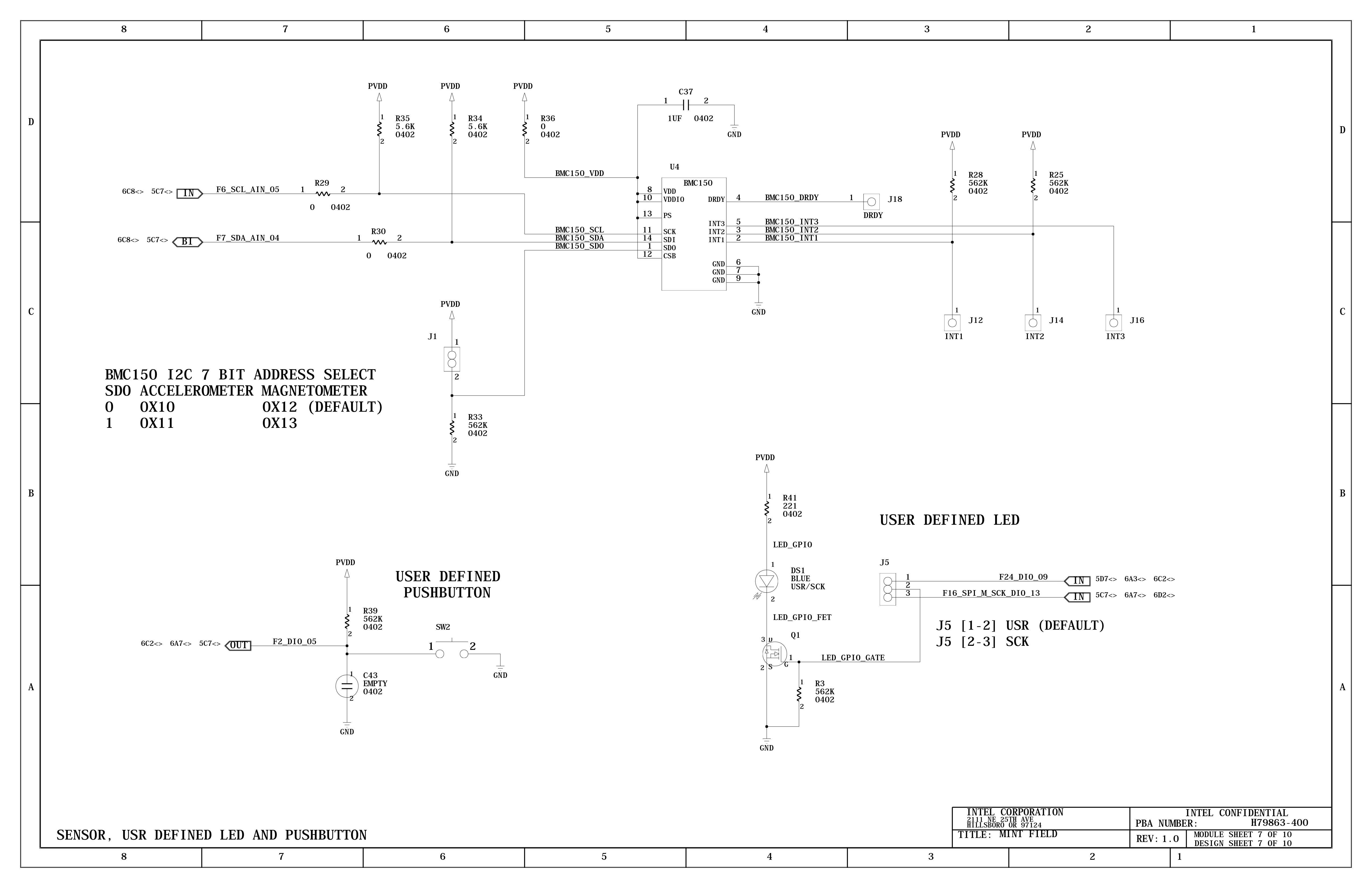
- Add a Button and LED to Your Intel® Quark™ Microcontroller Developer Kit D2000 - Intel
- The QMSI Pin Name and Pin Map of Intel® Quark™ Microcontroller D2000 CRB - Intel
- Blink LED Test on Intel Quark D2000 Development Board - Autodesk Instructables
- 【X86 MCU】安裝Quark D2000開發環境 作者:何信昱 - MakerPro
- Embedded System - Intel Quark - ShareTechnote
- The Quark D2000 Development Board: Moving Beyond “Hello World” - All About Circuits
上面难得有点用的应该也就是第 3 个链接了。防止英特尔下架,我贴在我这里:
Pin Map
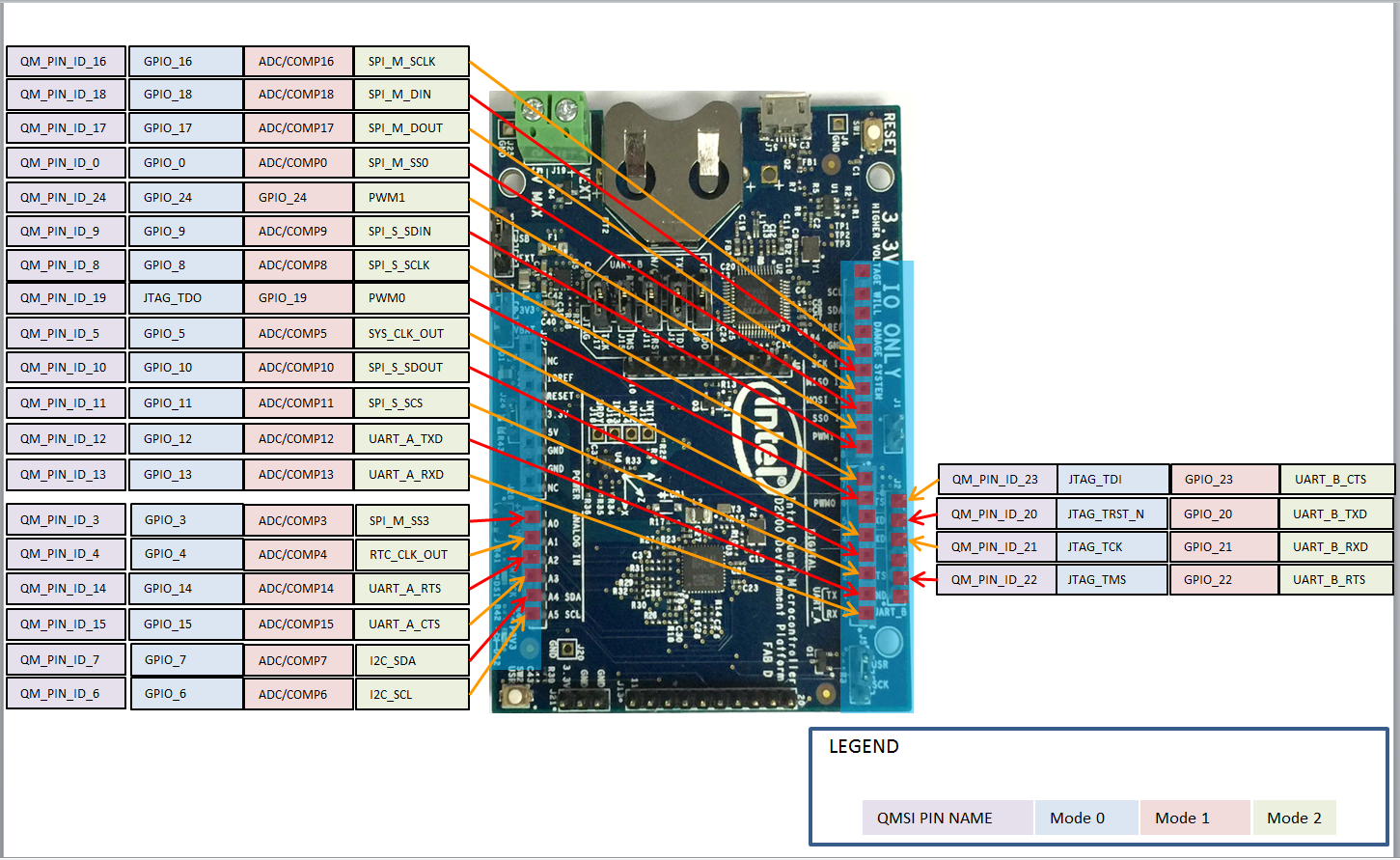
Pin Name
/** * External Pad pin identifiers **/ QM_PIN_ID_0, /**< Pin id 0. */ QM_PIN_ID_1, /**< Pin id 1. */ QM_PIN_ID_2, /**< Pin id 2. */ QM_PIN_ID_3, /**< Pin id 3. */ QM_PIN_ID_4, /**< Pin id 4. */ QM_PIN_ID_5, /**< Pin id 5. */ QM_PIN_ID_6, /**< Pin id 6. */ QM_PIN_ID_7, /**< Pin id 7. */ QM_PIN_ID_8, /**< Pin id 8. */ QM_PIN_ID_9, /**< Pin id 9. */ QM_PIN_ID_10, /**< Pin id 10. */ QM_PIN_ID_11, /**< Pin id 11. */ QM_PIN_ID_12, /**< Pin id 12. */ QM_PIN_ID_13, /**< Pin id 13. */ QM_PIN_ID_14, /**< Pin id 14. */ QM_PIN_ID_15, /**< Pin id 15. */ QM_PIN_ID_16, /**< Pin id 16. */ QM_PIN_ID_17, /**< Pin id 17. */ QM_PIN_ID_18, /**< Pin id 18. */ QM_PIN_ID_19, /**< Pin id 19. */ QM_PIN_ID_20, /**< Pin id 20. */ QM_PIN_ID_21, /**< Pin id 21. */ QM_PIN_ID_22, /**< Pin id 22. */ QM_PIN_ID_23, /**< Pin id 23. */ QM_PIN_ID_24, /**< Pin id 24. */ /** * Pin function type. (Mode 0 ~ Mode 3) */ QM_PMUX_FN_0, /* Mode 0 */ QM_PMUX_FN_1, /* Mode 1 */ QM_PMUX_FN_2, /* Mode 2 */ QM_PMUX_FN_3, /* Mode 3 */
Example
/* Mux out STDOUT_UART tx/rx pins and enable input for rx. */ qm_pmux_select(QM_PIN_ID_12, QM_PMUX_FN_2); qm_pmux_select(QM_PIN_ID_13, QM_PMUX_FN_2); qm_pmux_input_en(QM_PIN_ID_13, true);
那么你现在可能有疑问:IDE 都没有了,还有编译环境吗?有的,兄弟,有的。我们自己手动编译 IAMCU i586 的工具链。
手动编译 IAMCU i586 的工具链
英特尔十分难得地提供了 The Intel Quark MCUs Software Stack。在 QMSI(Quark Microcontroller Software Interface)中,英特尔提供了一个名为 qmsi 的目录,其中包含了 Quark D2000 和 SE C1000 的驱动和库。具体参照此链接。在自述文件中提到:
您必须首先设置 IAMCU_TOOLCHAIN_DIR 环境变量。 假设工具链被解压为 $HOME/issm_2016/ 并且 您可以在 $HOME/issm_2016/tools/compiler/gcc-ia/5.2.1/bin 中找到 i586-intel-elfiamcu-gcc ……
敢情英特尔还是定制了一个 i586 的交叉编译工具链。理得佢咁多,先搞一个试试。
环境
我用的是 Ubuntu Server 18.04.6 LTS,安装了以下依赖:
sudo apt update sudo apt install build-essential git cmake gcc-multilib g++-multilib python3-pip
这环境属实是东雪莲它妈给东雪莲开门——罕见到家了。
接着需要获取 QMSI,这是 Intel 官方早期为 Quark D2000 提供的裸机驱动层,包含 GPIO、UART、RTC、I2C 等外设支持:
git clone https://github.com/quark-mcu/qmsi.git cd qmsi
接着是编译和安装交叉编译工具链。Intel 官方推荐的工具链是 i586-intel-elfiamcu-gcc,不过因为你完全不可能下到原始安装包,所以我们需要手动编译。
export TARGET=i586-elf export PREFIX=/opt/cross # 下载 Binutils 和 GCC 源码 mkdir -p ~/quark-toolchain && cd ~/quark-toolchain wget https://ftp.gnu.org/gnu/binutils/binutils-2.36.tar.gz wget https://ftp.gnu.org/gnu/gcc/gcc-10.2.0/gcc-10.2.0.tar.gz tar -xvf binutils-2.36.tar.gz tar -xvf gcc-10.2.0.tar.gz cd gcc-10.2.0 ./contrib/download_prerequisites cd .. # 构建 binutils mkdir build-binutils && cd build-binutils ../binutils-2.36/configure --target=$TARGET --prefix=$PREFIX --disable-nls make -j$(nproc) sudo make install cd .. # 构建 gcc(只要 C) mkdir build-gcc && cd build-gcc ../gcc-10.2.0/configure --target=$TARGET --prefix=$PREFIX --disable-nls --enable-languages=c --without-headers make all-gcc -j$(nproc) make all-target-libgcc -j$(nproc) sudo make install-gcc sudo make install-target-libgcc
添加交叉编译工具链到 PATH:
export PATH=/opt/cross/bin:$PATH
检查是否安装成功:
i586-elf-gcc --version
现在环境才搭一半,工具链是“裸机”版本(newlib 或 newlib-nano 未安装或未连接),无法找到标准 C 头文件,如 stdio.h、stdlib.h 等。我们需要安装 newlib。
首先下载 newlib 源码:
git clone https://sourceware.org/git/newlib-cygwin.git cd newlib-cygwin
构建并安装 newlib:
mkdir build && cd build ../configure --target=i586-elf --prefix=/opt/cross make all -j$(nproc) make install # 如果安装失败,请尝试 sudo env "PATH=$PATH" make install
接着就是魔改 QMSI 的文件。定位到 qmsi 根目录下的 base.mk ,修改以下内容:
### Tools #PREFIX ?= arc-elf32 #TOOLCHAIN_DIR=$(ARCMCU_TOOLCHAIN_DIR) #else #PREFIX ?= i586-intel-elfiamcu #TOOLCHAIN_DIR=$(IAMCU_TOOLCHAIN_DIR) #endif TOOLCHAIN_DIR := $(dir $(CROSS_COMPILE)) PREFIX := $(notdir $(CROSS_COMPILE)) CFLAGS += -Wno-error=implicit-fallthrough . . . ifeq ($(TARGET), sensor) CFLAGS += -DQM_SENSOR CFLAGS += -ffreestanding CFLAGS += -mARCv2EM -mav2em -mno-sdata LDFLAGS += -nostartfiles LDLIBS += -lc -lgcc else #LDLIBS += -lc -lnosys -lsoftfp -lgcc LDLIBS += -lc -lgcc
最后是编译,我们尝试编译一个 blinky:
unset IAMCU_TOOLCHAIN_DIR cd ~/qmsi/examples/blinky export CROSS_COMPILE=/opt/cross/bin/i586-elf make TARGET=x86 SOC=quark_d2000 V=1
编译成功后会在 release/quark_d2000/x86/bin/blinky.bin。
注意:如果编译时候遇到编译器抛出 switch-case 函数错误
error: this statement may fall through [-Werror=implicit-fallthrough=]的时候,请定位到报错行下方添加__attribute__((fallthrough));。
烧录
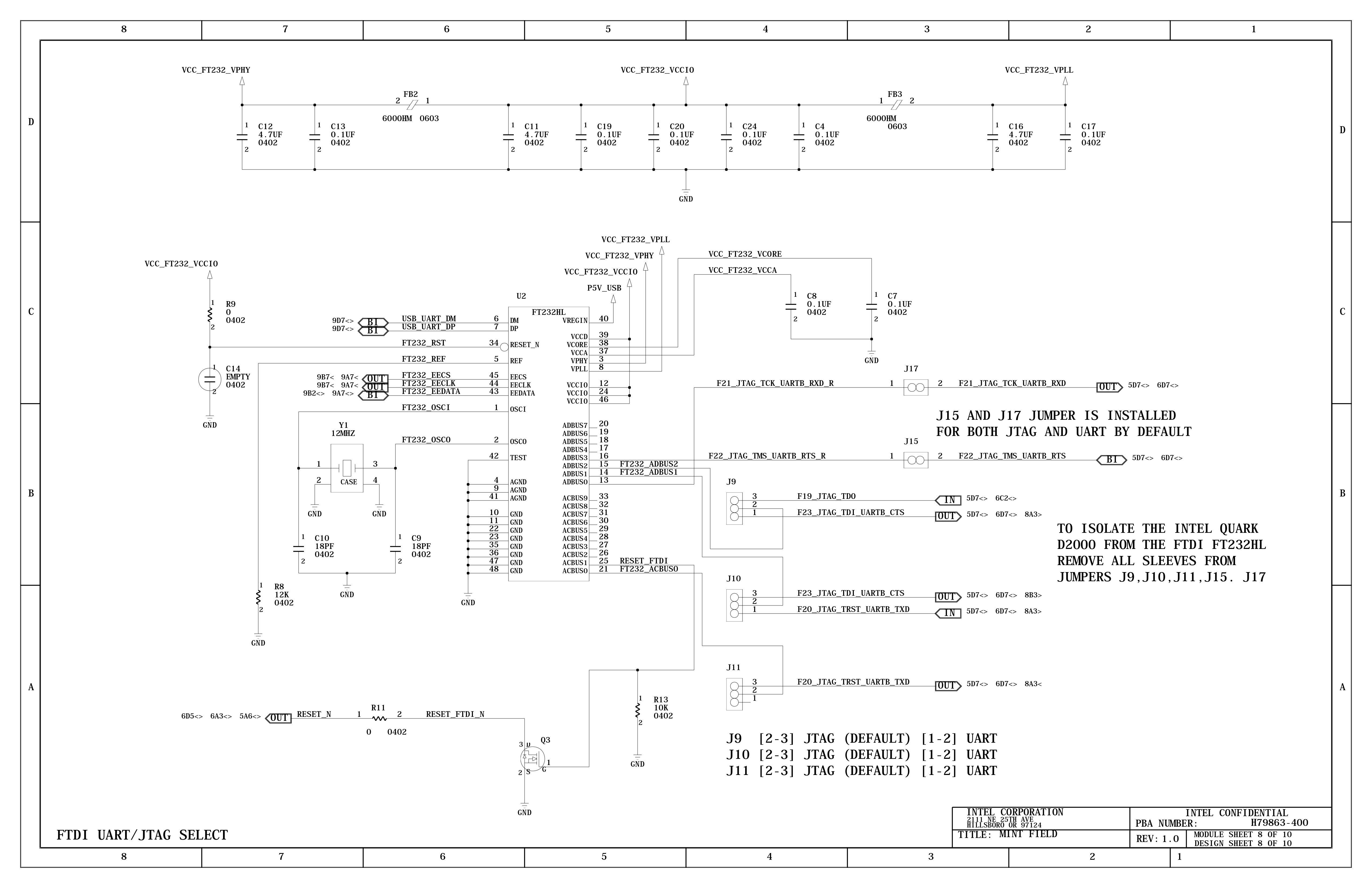
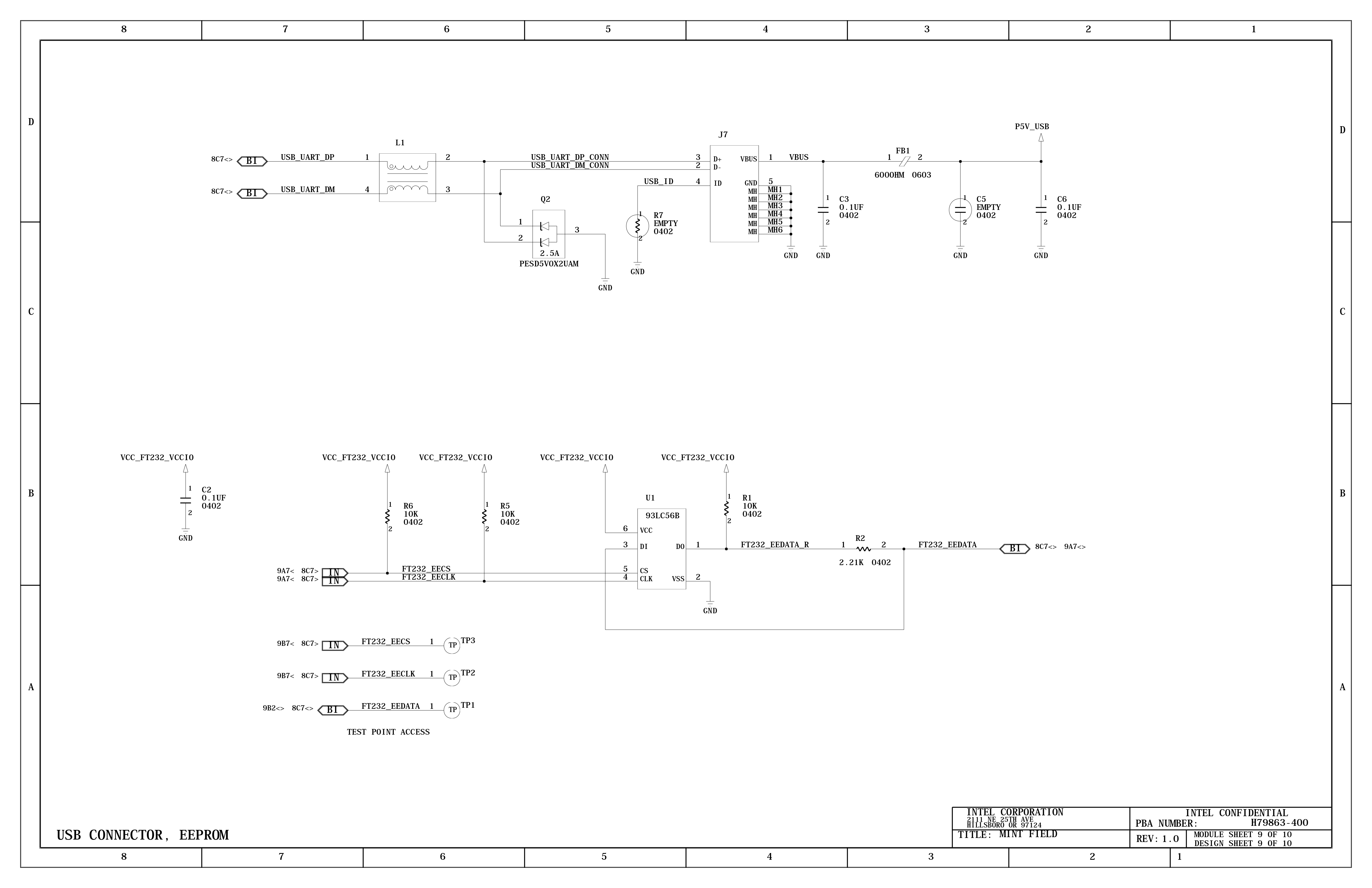
非常幸运的是,这个板子自带 FTDI FT232HL USB 转串口芯片,所以我们可以直接使用 OpenOCD 来烧录。
首先,如果你用的是 Windows 系统,需要下载 Zadig 工具,将 FT232HL 的驱动安装为 WinUSB。如果你用的是 Linux 系统,通常不需要额外安装驱动。
我们需要下载英特尔提供的 OpenOCD 副本。点击此处下载对应操作系统的版本。解压后,进入 scripts 目录。
接着从 Intel/OpenOCD 仓库中,定位到 tcl/board/ 目录,找到 quark_d2000.cfg 和 quark_d2000_onboard.cfg 两个文件,下载到 $Intel_OpenOCD/scripts/board/ 目录下。然后定位到 tcl/target/ 目录,找到 quark_d2000.cfg 文件,下载到 $Intel_OpenOCD/scripts/target/ 目录下。
现在我们通过命令行/终端进入到 OpenOCD 的 bin 目录下。
我们还需要下载 Quark D2000 的 Bootloader。点击此处下载 1.3.0 版本的 Bootloader。
因为我准备在 Windows 上刷板子,所以还需要使用 scp 命令将 blinky.bin 复制到 OpenOCD 的 bin 目录下。
scp.exe [email protected]:/home/tomato/qmsi/examples/blink/release/quark_d2000/x86/bin/blinky.bin ./blinky.bin
我们现在就可以通过 OpenOCD 来烧录了。
.\openocd.exe -f ..\scripts\board\quark_d2000_onboard.cfg -c "flash_rom quark_d2000_rom.bin 0" .\openocd.exe -f ..\scripts\board\quark_d2000_onboard.cfg -c "flash_rom blinky.bin 0x00180000"
如果是 Linux 系统,可以参考此处第24页,命令类似:
./openocd -f ../scripts/board/quark_d2000_onboard.cfg -c "init" -c "flash_rom quark_d2000_rom.bin" -c "shutdown"
在看到 All done的时候按下复位键,蓝色的 USR LED 会每隔 0.25s 闪烁一下,表示烧录成功。
或者是配合 gdb 调试。先在 OpenOCD 的 bin 目录下执行:
.\openocd.exe -f ..\scripts\board\quark_d2000_onboard.cfg
就会显示如下信息:
Open On-Chip Debugger 0.8.0-dev-ga422c7e (2016-05-23-16:57)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.sourceforge.net/doc/doxygen/bugs.html
Info : only one transport option; autoselect 'jtag'
adapter speed: 1000 kHz
trst_only separate trst_push_pull
adapter speed: 1000 kHz
trst_only separate trst_push_pull
Info : clock speed 1000 kHz
Info : JTAG tap: quark_d2000.cltap tap/device found: 0x0e786013 (mfg: 0x009, part: 0xe786, ver: 0x0)
Enabling lmt core tap
Info : JTAG tap: quark_d2000.lmt enabled
接着打开另一个终端,执行:
gbd
如果在 Windows 上运行前提是你得安装好 MSYS2。
然后在 gdb 中输入:
(gdb) target remote :3333
接着输入以下命令来烧录程序:
(gdb) monitor reset halt (gdb) monitor load_image blinky.bin 0x00180000 (gdb) monitor reset
配置 Zephyr RTOS
(2025-06-02 更新)
Zephyr RTOS 是一个开源的实时操作系统,支持多种硬件平台,包括 Intel Quark D2000。我们可以使用 Zephyr 来开发更复杂的应用。
但是我们不能用最新的 Zephyr 版本,因为 Quark D2000 的支持在 Zephyr 2.0 之后被移除。我们需要使用 Zephyr 1.14.0 版本 和 SDK 0.10.0 版本。
环境准备
回到 Ubuntu Server 18.04.6 LTS 环境,安装 Zephyr 所需的依赖:
sudo apt-get update sudo apt-get install --no-install-recommends git cmake ninja-build gperf \ ccache dfu-util device-tree-compiler wget \ python3-pip python3-setuptools python3-wheel xz-utils file make gcc \ gcc-multilib
Zephyr 需要CMake 版本 3.13.1 或更高版本。但是 Ubuntu 18.04 默认的 CMake 版本是 3.10.2,我们需要手动安装最新版本的 CMake:
sudo apt purge cmake python3 -m pip install --upgrade pip python3 -m pip install scikit-build==0.14.0 python3 -m pip install cmake
安装完之后可能会遇到 WARNING: The scripts cmake, cpack and ctest are installed in '/home/tomato/.local/bin' which is not on PATH. 的警告。我们需要将其添加到 PATH 中:
export PATH="$HOME/.local/bin:$PATH" echo 'export PATH="$HOME/.local/bin:$PATH"' >> ~/.bashrc source ~/.bashrc
最后我们需要安装 安装 Zephyr 软件开发工具包 (SDK):
wget https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.10.0/zephyr-sdk-0.10.0-setup.run cd <sdk download directory> sh zephyr-sdk-0.10.0-setup.run
导出 Zephyr SDK 的环境变量,默认位置在 /opt/zephyr-sdk/:
export ZEPHYR_TOOLCHAIN_VARIANT=zephyr export ZEPHYR_SDK_INSTALL_DIR=<sdk installation directory>
下载 Zephyr 源码
使用 Bootstrap West 工具来下载 Zephyr 源码:
python3 -m pip install west
我们需要指定 Zephyr 的版本为 1.14.0:
west init zephyrproject --mr v1.14.0 cd zephyrproject west update
安装 Python 依赖项
Zephyr 需要一些 Python 依赖项,我们可以使用 pip 来安装:
python3 -m pip install -r zephyr/scripts/requirements.txt
如果你在安装过程中遇到依赖项问题,可以把 zephyr/scripts/requirements.txt 中 hub==2.0 改成 hub==2.0.9。
构建应用程序
导航到主项目目录:
cd zephyrproject/zephyr
设置环境:
source zephyr-env.sh
构建 blinky 示例应用程序:
cd samples/basic/blinky west build -b quark_d2000_crb .
构建完成后会在 build/zephyr/zephyr.bin 生成二进制文件。烧录方式和上面类似。烧录成功后按下复位键,蓝色的 USR LED 会每隔 1s 闪烁一下,表示烧录成功。
可以参照Zephyr 1.14.0 官方文档来了解更多关于 Zephyr 的信息。
完成
至此,我们在失去官方工具链的情况下成功复活了这个板子。
引用
- Intel® Quark™ Microcontroller D2000 - Intel
- Warren, Tom. Intel now faces a fight for its future. The Verge. 2018-06-22 [2020-11-26]. (原始内容存档于2020-12-05)
- Who killed the Quark? by Eric Brown - LinuxGizmos.com
- The Intel Quark®™ Microcontroller: Why an x86 MCU is The Right Stuff for The Internet of Things, By Bill Giovino - Mouser Electornics